Massa-Veer Systemen
WB1643 Werktuigkundig Ontwerpproject 3
toegepaste mechanica
Bij dynamica leer je veel over massa-veer systemen. Deze systemen zijn relatief eenvoudig te begrijpen en door te rekenen. De ontwerpen die wij als werktuigbouwkundigen maken zijn vaak een stuk complexer. Toch blijkt een massa-veer systeem in veel gevallen een goed model te zijn om de dynamische respons van het systeem te bepalen. Zo kunnen we veel sneller de effecten van onze ontwerpkeuzes evalueren en bijstellen.
In dit onderdeel kijken we naar drie manieren waarop massa-veer systemen ons helpen bij het begrijpen van onze ontwerpen:
OpmerkingValbestendigheid

Hoe kunnen we verende elementen gebruiken om onze ontwerpen robuust te maken tegen schokken?
OpmerkingExcitatie-respons

Hoe reageert mijn systeem op trillingen?
OpmerkingEigenfrequenties

Bij welke frequenties kan ik resonantie in mijn systeem verwachten?
Valbestendigheid
Mijn telefoon is, kort nadat ik een nieuw hoesje eromheen had gezet, gebarsten. Hoe kan het dat dit wel gebeurd met dit hoesje, maar niet met het originele hoesje?
Tijdens het testen, is de kans groot dat je ontwerp een keer valt. Wanneer dat gebeurt, wil je natuurlijk dat deze het daarna nog steeds doet. Hoe kunnen we hierop onwerpen?
Als je van een tafel springt, veer je een beetje door je knieën. Zo verleng je de weg en wordt de landing comfortabeler. Wanneer je dit niet doet, voel je het in je knieën. De weg die je aflegt tijdens het landen maakt dus uit voor het effect van de val.
Wanneer we willen ontwerpen op valbestendigheid, moeten we dus ook kijken naar de weg die het ontwerp af kan leggen totdat het helemaal tot stilstand komt. Wanneer we deze weg kunnen verlengen, kunnen we de krachten die optreden tijdens het landen verlagen.
Modelleren
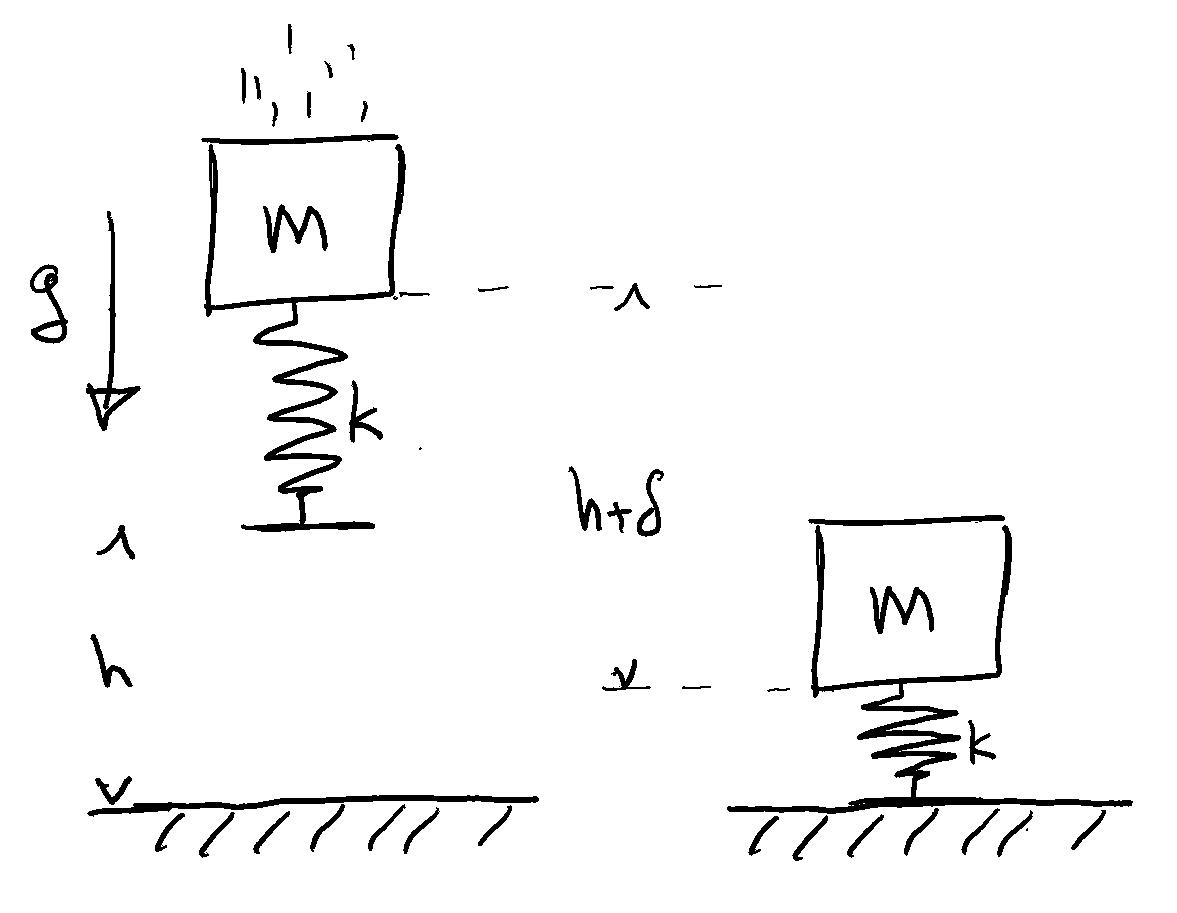
We modelleren onze telefoon als een massa \(m\) die van een hoogte \(h\) valt. Aan de buitenkant zit het hoesje, met een stijfheid \(k\). Wanneer de telefoon landt, zal het hoesje indrukken met een afstand \(\delta\). We gaan er hierbij vanuit dat de indrukking lineair-elastisch is, dus dat \(F_n = k\delta\).
Aan het begin van de val, heeft de telefoon potentiële energie in de vorm van hoogte-energie. Deze wordt gegeven door
\[ E_h = mgh.\]
Tijdens het vallen wordt deze energie omgezet in kinetisch energie. Wanneer we luchtwrijving verwaarlozen gaat dit zonder verliezen.
Bij het landen op de grond, wordt alle energie overgedragen op de grond zodat de telefoon daarna stil ligt1. Om dit te bereiken, moet de grond een arbeid leveren op de telefoon:
1 In werkelijkheid zal de telefoon waarschijnlijk een stukje terugveren en na de botsing weer omhoog bewegen. Een gevolg hiervan is dat de kracht in werkelijkheid groter is dan we hier berekenen. Om het onszelf wat gemakkelijker te maken nemen we dat hier niet mee.
\[ W = \int F_n ds,\]
met \(F_n\) de kracht van de grond op de telefoon en \(s\) de weg die de telefoon aflegt tijdens het landen.
Tijdens het landen deukt het hoesje een afstand \(\delta\) in. Dat vormt de weg waarover de kracht geïntegreerd wordt. Door de op te nemen hoogte energie gelijk te stellen aan de geleverde arbeid, krijgen we:
\[\begin{aligned} mg(h + \delta) &= \int\limits_0^\delta F_n ds\\ &= \int\limits_0^\delta ks ds\\ &= \frac{k\delta^2}{2}\\ \delta^2 - 2\frac{mg}{k}\delta - 2\frac{mg}{k}h &= 0 \end{aligned}\]Deze vergelijking kunnen we oplossen met de ABC-formule. Dan krijgen we het volgende resultaat voor \(\delta\):
\[ \delta = \left(1 \pm \sqrt{1 + \frac{2h}{\delta_\text{stat}}}\right)\delta_\text{stat}, \]
waar \(\delta_\text{stat}\) de statische indrukking is:
\[\delta_\text{stat} = \frac{mg}{k}.\]
We zien hier dat de indrukking tijdens het landen groter is dan de statische indrukking. Het hoesje deukt immers verder in dan wanneer de telefoon gewoon op de grond gelegd wordt. De versterkingsfactor van de indrukking, ten opzichte van de statische indrukking, is dus
\[\frac{\delta}{\delta_\text{stat}} = 1 + \sqrt{1 + \frac{2h}{\delta_\text{stat}}}. \]
Dit geldt ook voor de spanningen. We gaan er immers bij het rekenen vanuit dat de verhoudingen lineair-elastisch zijn. Deze versterkingsfactor moet dus altijd kleiner zijn dan de veiligheidsfactor op de spanningen in ons materiaal
\[ \frac{\delta}{\delta_\text{stat}} < \text{SF}.\]
Maximale kracht
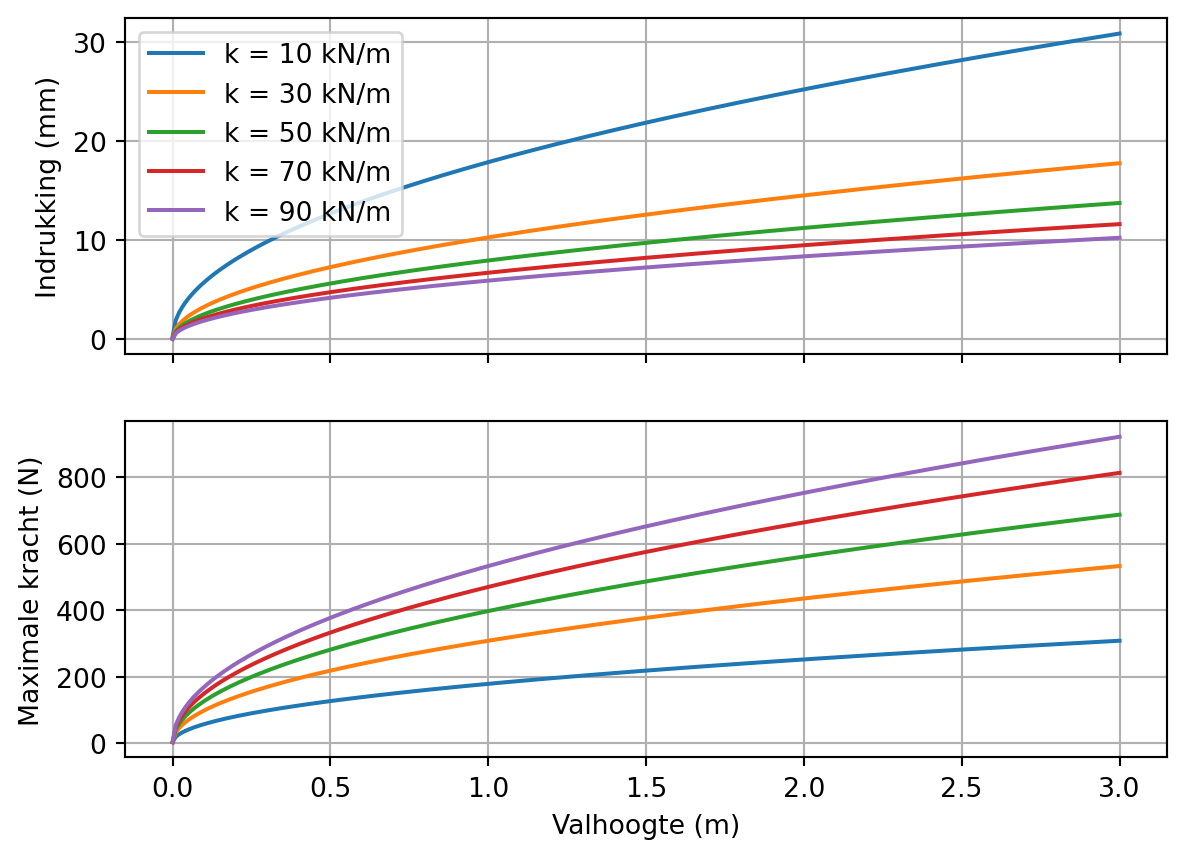
Met deze gegevens, kunnen we ook de maximale kracht op de telefoon berekenen:
\[F_\text{max} = k\delta = k\left(1 + \sqrt{1 + \frac{2h}{\delta_\text{stat}}}\right)\delta_\text{stat}.\]
De restulaten hiervan zijn getoond in Figuur 3. We zien dat wanneer we de maximale kracht op de telefoon willen beperken, we het beste de stijfheid van het hoesje zo laag makelijk kunnen maken. Echter wordt de indrukking die benodid is om de val te absorberen dan al snel onrealistisch groot. Wanneer we een stijf hoesje gebruiken, zal de indrukking beperkt blijven, maar neemt de maximale kracht weer sterk toe. Er is dus een compromis te maken tussen deze twee factoren.
Eigenfrequentie
De eigenfrequentie is de natuurlijke frequentie van een massa-veer systeem. Wanneer het systeem aangeslagen wordt, zal het bij deze frequentie gaan trillen. Voor een beweging bij deze frequentie, is geen externe kracht nodig. Voor een ongedempt systeem zal de trilling dus altijd door blijven gaan.
De frequentie waarvoor dit geldt bij een massa-veersysteem, wordt gegeven door
\[ \omega_0 = \sqrt{\frac{k}{m}}, \]
met \(k\) de stijfheid van de veer en \(m\) de massa van het object(van Beek 2024, p9). Wanneer we de stijfheid van de veer weten, en de eigenfrequentie \(\omega_0\) kunnen meten, kunnen we dus de massa van het object bepalen.
We gaan er hier vanuit dat de trillingen lineair zijn. Echter kan een systeem ook een eigenfrequentie hebben die juist torsie betreft. In dat geval wordt de eigenfrequentie gegeven door
\[ \omega_0 = \sqrt{\frac{k_\phi}{I}}, \]
waarbij \(k_\phi\) de torsiestijfheid is en \(I\) het traagheidsmoment van het object(van Beek 2024, p9).
Eigenfrequenties van een massa aan een balk
Veel situaties die we in machines tegenkomen kunnen teruggebracht worden tot een massa die op een balk bevestigd is. Wanneer de massa voldoende zwaar is ten opzichte van de massa van de balk, kunnen we de massa van de balk verwaarlozen. Dan kunnen we de balk met de massa als een massa-veer systeem modelleren. De stijfheid van de veer is dan de stijfheid van de balk. Die kunnen we afleiden uit de vergeetmenietjes(van Beek 2024, p6):
van Beek, Anton. 2024. Formule Boekje. 9de dr. Mikro Centrum.
De eigenfrequentie wordt dan
\[ \omega_0 = \sqrt{\frac{k}{m}} = \sqrt{\frac{3EI}{mL^3}}. \]
Eigenfrequenties van de balk zelf
In de beweging hierboven verwaarloosden we de massa van de balk. In veel gevallen zal dat niet kunnen. Wanneer dat niet kan, worden de vergelijkingen een stuk lastiger. De vorm waarin de balk trilt wordt dan belangrijk. Niet alle stukjes massa van de balk trillen immers met dezelfde amplitude. Door de Euler-Bernouilli vergelijkingen voor de balk numeriek op te lossen, kunnen we correctiefactoren vinden die de eigenfrequentie van de balk bepalen(Inman 2001). Wanneer er geen extra massa op de balk bevestigd is, worden de eigenfrequenties dan gegeven door:
Inman, D. J. 2001. Engineering Vibration. 2nd ed. Prentice Hall.
Ten opzichte van het massa-veer systeem is er dus een correctiefactor bijgekomen. Voor de eerste drie eigenmodes van een eenzijdig ingeklemde balk zijn deze
| n | \(\beta L\) |
|---|---|
| 1 | 1.875 |
| 2 | 4.694 |
| 3 | 7.855 |
Dit kunnen we ook meenemen als een “effectieve massa” van de balk. Dit kunnen we doen door de formule om te schrijven. Voor de eerste eigenmodus vinden we dan
\[ m_\text{eff} = 0.2357 m. \]
Een balk met een verwaarloosbare massa en een massa aan het einde van \(0.2357\,\text{kg}\) heeft dus dezelfde eigenfrequentie als een balk met massa \(m\) en dezelfde lengte.
De eigenfrequentie wordt dan weer gegeven door
\[ \omega_0 = \sqrt{\frac{3EI}{m_\text{eff}L^3}} \]
Wanneer we nu een massa aan het einde van de balk toevoegen kunnen we die bij deze effectieve massa optellen.
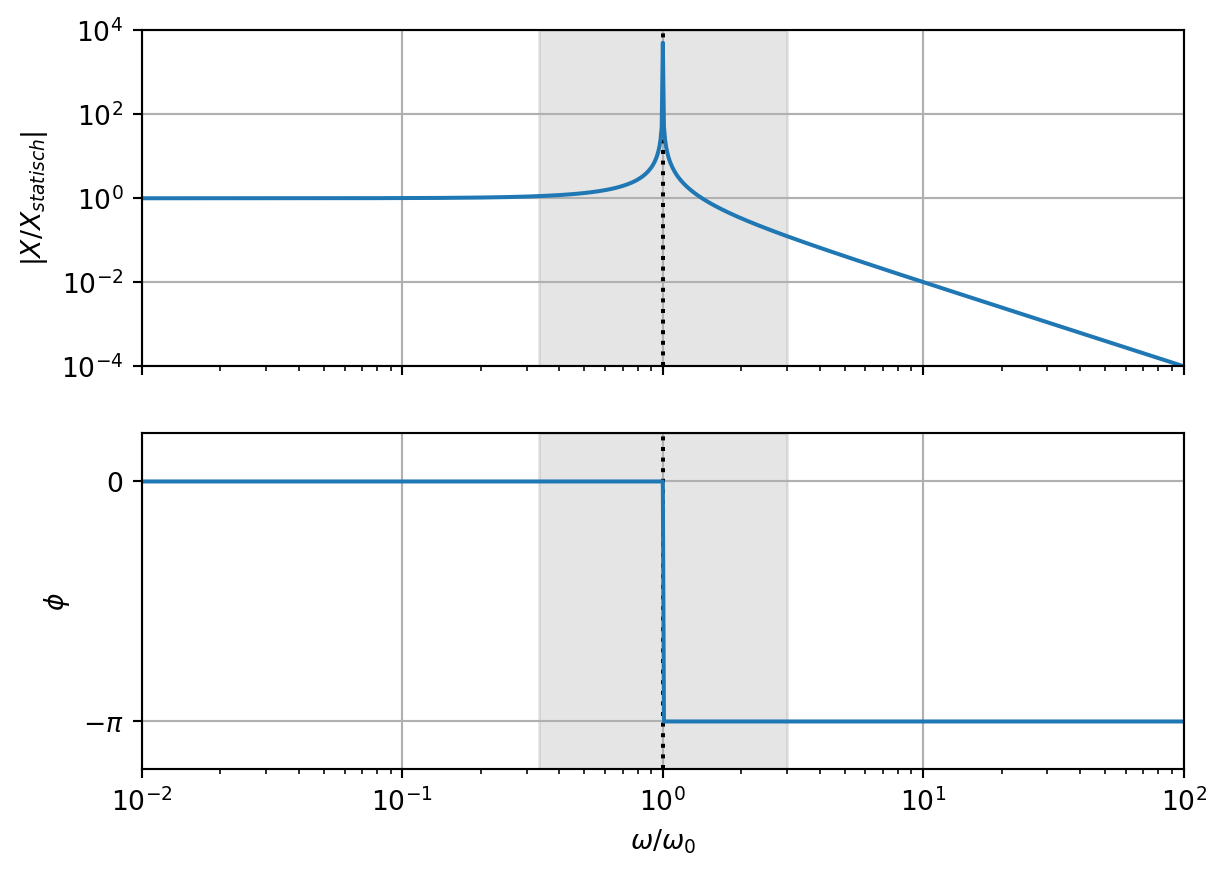
Excitatierespons
Voor een aangedreven trilling maakt het veel uit of je dit in de buurt van de eigenfrequentie doet. In het boek van Cool (Cool e.a. 2023), wordt dit dan ook een scheidingsfrequentie genoemd. Voor een aandrijffrequentie die onder \(\frac{\omega_0}{3}\) zit, hoef je je niet zo’n zorgen te maken over de trillingen en kun je het systeem statisch benaderen. De uitwijking van de veer zal recht evenredig zijn met de kracht die erop gezet wordt.
Cool, Jan C., Gabriëlle J. M. Tuijthof, Giuseppe Radaelli, en Regine W. Vroom. 2023. Werktuigkundige Systemen. In TU Delft OPEN Textbooks. TU Delft OPEN Textbooks. https://doi.org/10.59490/t.2023.006.
Bij een aandrijffrequentie boven \(3\omega_0\) worden juist de uitwijkingen minder belangrijk. De massa van het massa-veer systeem is dominant en werkt de opgelegde beweging tegen.